Dynamic Programming is the most powerful design technique for solving optimization problems.
Divide & Conquer algorithm partition the problem into disjoint subproblems solve the subproblems recursively and then combine their solution to solve the original problems.
Dynamic Programming is used when the subproblems are not independent, e.g. when they share the same subproblems. In this case, divide and conquer may do more work than necessary, because it solves the same sub problem multiple times.
Dynamic Programming solves each subproblems just once and stores the result in a table so that it can be repeatedly retrieved if needed again.
Dynamic Programming is a Bottom-up approach- we solve all possible small problems and then combine to obtain solutions for bigger problems.
Dynamic Programming is a paradigm of algorithm design in which an optimization problem is solved by a combination of achieving sub-problem solutions and appearing to the "principle of optimality".
Characteristics of Dynamic Programming:
Dynamic Programming works when a problem has the following features:-
Optimal Substructure: If an optimal solution contains optimal sub solutions then a problem exhibits optimal substructure.
Overlapping subproblems: When a recursive algorithm would visit the same subproblems repeatedly, then a problem has overlapping subproblems.
If a problem has optimal substructure, then we can recursively define an optimal solution. If a problem has overlapping subproblems, then we can improve on a recursive implementation by computing each subproblem only once.
If a problem doesn't have optimal substructure, there is no basis for defining a recursive algorithm to find the optimal solutions. If a problem doesn't have overlapping sub problems, we don't have anything to gain by using dynamic programming.
If the space of subproblems is enough (i.e. polynomial in the size of the input), dynamic programming can be much more efficient than recursion.
Elements of Dynamic Programming
There are basically three elements that characterize a dynamic programming algorithm:-
Substructure: Decompose the given problem into smaller subproblems. Express the solution of the original problem in terms of the solution for smaller problems.
Table Structure: After solving the sub-problems, store the results to the sub problems in a table. This is done because subproblem solutions are reused many times, and we do not want to repeatedly solve the same problem over and over again.
Bottom-up Computation: Using table, combine the solution of smaller subproblems to solve larger subproblems and eventually arrives at a solution to complete problem.
Note: Bottom-up means:-
Start with smallest subproblems.
Combining their solutions obtain the solution to sub-problems of increasing size.
Until solving at the solution of the original problem.
Components of Dynamic programming
Stages: The problem can be divided into several subproblems, which are called stages. A stage is a small portion of a given problem. For example, in the shortest path problem, they were defined by the structure of the graph.
States: Each stage has several states associated with it. The states for the shortest path problem was the node reached.
Decision: At each stage, there can be multiple choices out of which one of the best decisions should be taken. The decision taken at every stage should be optimal; this is called a stage decision.
Optimal policy: It is a rule which determines the decision at each stage; a policy is called an optimal policy if it is globally optimal. This is known as Bellman principle of optimality.
Given the current state, the optimal choices for each of the remaining states does not depend on the previous states or decisions. In the shortest path problem, it was not necessary to know how we got a node only that we did.
There exist a recursive relationship that identify the optimal decisions for stage j, given that stage j+1, has already been solved.
The final stage must be solved by itself.
Development of Dynamic Programming Algorithm
It can be broken into four steps:
Characterize the structure of an optimal solution.
Recursively defined the value of the optimal solution. Like Divide and Conquer, divide the problem into two or more optimal parts recursively. This helps to determine what the solution will look like.
Compute the value of the optimal solution from the bottom up (starting with the smallest subproblems)
Construct the optimal solution for the entire problem form the computed values of smaller subproblems.
Applications of dynamic programming
0/1 knapsack problem
Mathematical optimization problem
All pair Shortest path problem
Reliability design problem
Longest common subsequence (LCS)
Flight control and robotics control
Time-sharing: It schedules the job to maximize CPU usage
Differentiate between Divide & Conquer Method vs Dynamic Programming.
Divide & Conquer Method
Dynamic Programming
1.It deals (involves) three steps at each level of recursion: Divide the problem into a number of subproblems. Conquer the subproblems by solving them recursively. Combine the solution to the subproblems into the solution for original subproblems.
1.It involves the sequence of four steps:
Characterize the structure of optimal solutions.
Recursively defines the values of optimal solutions.
Compute the value of optimal solutions in a Bottom-up minimum.
Construct an Optimal Solution from computed information.
2. It is Recursive.
2. It is non Recursive.
3. It does more work on subproblems and hence has more time consumption.
3. It solves subproblems only once and then stores in the table.
4. It is a top-down approach.
4. It is a Bottom-up approach.
5. In this subproblems are independent of each other.
5. In this subproblems are interdependent.
6. For example: Merge Sort & Binary Search etc.
6. For example: Matrix Multiplication.
Matrix Chain Multiplication
It is a Method under Dynamic Programming in which previous output is taken as input for next.
Here, Chain means one matrix's column is equal to the second matrix's row [always].
In general:
If A = ⌊aij⌋ is a p x q matrix
B = ⌊bij⌋ is a q x r matrix
C = ⌊cij⌋ is a p x r matrix
Then
Given following matrices {A1,A2,A3,...An} and we have to perform the matrix multiplication, which can be accomplished by a series of matrix multiplications
A1 xA2 x,A3 x.....x An
Matrix Multiplication operation is associative in nature rather commutative. By this, we mean that we have to follow the above matrix order for multiplication but we are free to parenthesize the above multiplication depending upon our need.
In general, for 1≤ i≤ p and 1≤ j ≤ r
It can be observed that the total entries in matrix 'C' is 'pr' as the matrix is of dimension p x r Also each entry takes O (q) times to compute, thus the total time to compute all possible entries for the matrix 'C' which is a multiplication of 'A' and 'B' is proportional to the product of the dimension p q r.
It is also noticed that we can save the number of operations by reordering the parenthesis.
Example1: Let us have 3 matrices, A1,A2,A3 of order (10 x 100), (100 x 5) and (5 x 50) respectively.
Three Matrices can be multiplied in two ways:
A1,(A2,A3): First multiplying(A2 and A3) then multiplying and resultant withA1.
(A1,A2),A3: First multiplying(A1 and A2) then multiplying and resultant withA3.
No of Scalar multiplication in Case 1 will be:
(100 x 5 x 50) + (10 x 100 x 50) = 25000 + 50000 = 75000
No of Scalar multiplication in Case 2 will be:
(100 x 10 x 5) + (10 x 5 x 50) = 5000 + 2500 = 7500
To find the best possible way to calculate the product, we could simply parenthesis the expression in every possible fashion and count each time how many scalar multiplication are required.
Matrix Chain Multiplication Problem can be stated as "find the optimal parenthesization of a chain of matrices to be multiplied such that the number of scalar multiplication is minimized".
Number of ways for parenthesizing the matrices:
There are very large numbers of ways of parenthesizing these matrices. If there are n items, there are (n-1) ways in which the outer most pair of parenthesis can place.
(A1) (A2,A3,A4,................An)
Or (A1,A2) (A3,A4 .................An)
Or (A1,A2,A3) (A4 ...............An)
........................
Or(A1,A2,A3.............An-1) (An)
It can be observed that after splitting the kth matrices, we are left with two parenthesized sequence of matrices: one consist 'k' matrices and another consist 'n-k' matrices.
Now there are 'L' ways of parenthesizing the left sublist and 'R' ways of parenthesizing the right sublist then the Total will be L.R:
Also p (n) = c (n-1) where c (n) is the nth Catalon number
c (n) =
On applying Stirling's formula we have
c (n) = Ω
Which shows that 4n grows faster, as it is an exponential function, then n1.5.
Development of Dynamic Programming Algorithm
Characterize the structure of an optimal solution.
Define the value of an optimal solution recursively.
Compute the value of an optimal solution in a bottom-up fashion.
Construct the optimal solution from the computed information.
Dynamic Programming Approach
Let Ai,j be the result of multiplying matrices i through j. It can be seen that the dimension of Ai,j is pi-1 x pj matrix.
Dynamic Programming solution involves breaking up the problems into subproblems whose solution can be combined to solve the global problem.
At the greatest level of parenthesization, we multiply two matrices
A1.....n=A1....k x Ak+1....n)
Thus we are left with two questions:
How to split the sequence of matrices?
How to parenthesize the subsequence A1.....k andAk+1......n?
One possible answer to the first question for finding the best value of 'k' is to check all possible choices of 'k' and consider the best among them. But that it can be observed that checking all possibilities will lead to an exponential number of total possibilities. It can also be noticed that there exists only O (n2 ) different sequence of matrices, in this way do not reach the exponential growth.
Step1: Structure of an optimal parenthesization: Our first step in the dynamic paradigm is to find the optimal substructure and then use it to construct an optimal solution to the problem from an optimal solution to subproblems.
Let Ai....j where i≤ j denotes the matrix that results from evaluating the product
Ai Ai+1....Aj.
If i < j then any parenthesization of the product Ai Ai+1 ......Aj must split that the product between Ak and Ak+1 for some integer k in the range i ≤ k ≤ j. That is for some value of k, we first compute the matrices Ai.....k & Ak+1....j and then multiply them together to produce the final product Ai....j. The cost of computing Ai....k plus the cost of computing Ak+1....j plus the cost of multiplying them together is the cost of parenthesization.
Step 2: A Recursive Solution: Let m [i, j] be the minimum number of scalar multiplication needed to compute the matrixAi....j.
If i=j the chain consist of just one matrix Ai....i=Ai so no scalar multiplication are necessary to compute the product. Thus m [i, j] = 0 for i= 1, 2, 3....n.
If i<j we assume that to optimally parenthesize the product we split it between Ak and Ak+1 where i≤ k ≤j. Then m [i,j] equals the minimum cost for computing the subproducts Ai....k and Ak+1....j+ cost of multiplying them together. We know Ai has dimension pi-1 x pi, so computing the product Ai....k and Ak+1....jtakes pi-1 pk pj scalar multiplication, we obtain
m [i,j] = m [i, k] + m [k + 1, j] + pi-1 pk pj
There are only (j-1) possible values for 'k' namely k = i, i+1.....j-1. Since the optimal parenthesization must use one of these values for 'k' we need only check them all to find the best.
So the minimum cost of parenthesizing the product Ai Ai+1......Aj becomes
To construct an optimal solution, let us define s [i,j] to be the value of 'k' at which we can split the product Ai Ai+1 .....Aj To obtain an optimal parenthesization i.e. s [i, j] = k such that
m[i, j] = m[i, k]+m[k+1, j]+Pi-1 Pk Pj
Example of Matrix Chain Multiplication
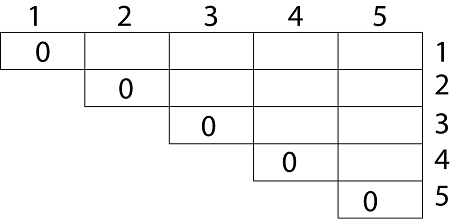
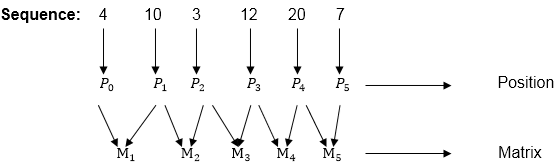
Example: We are given the sequence {4, 10, 3, 12, 20, and 7}. The matrices have size 4 x 10, 10 x 3, 3 x 12, 12 x 20, 20 x 7. We need to compute M [i,j], 0 ≤ i, j≤ 5. We know M [i, i] = 0 for all i.
Let us proceed with working away from the diagonal. We compute the optimal solution for the product of 2 matrices.
Here P0 to P5 are Position and M1 to M5 are matrix of size (pi to pi-1)
On the basis of sequence, we make a formula
In Dynamic Programming, initialization of every method done by '0'.So we initialize it by '0'.It will sort out diagonally.
We have to sort out all the combination but the minimum output combination is taken into consideration.
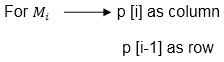
Calculation of Product of 2 matrices:
1. m (1,2) = m1 x m2
= 4 x 10 x 10 x 3
= 4 x 10 x 3 = 120
2. m (2, 3) = m2 x m3
= 10 x 3 x 3 x 12
= 10 x 3 x 12 = 360
3. m (3, 4) = m3 x m4
= 3 x 12 x 12 x 20
= 3 x 12 x 20 = 720
4. m (4,5) = m4 x m5
= 12 x 20 x 20 x 7
= 12 x 20 x 7 = 1680
We initialize the diagonal element with equal i,j value with '0'.
After that second diagonal is sorted out and we get all the values corresponded to it
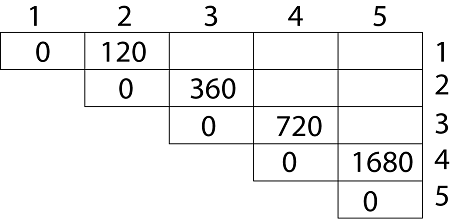
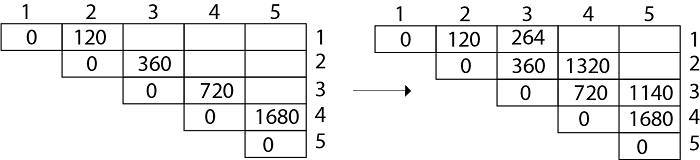
Now the third diagonal will be solved out in the same way. Now product of 3 matrices:
M [1, 3] = M1 M2 M3
There are two cases by which we can solve this multiplication: ( M1 x M2) + M3, M1+ (M2x M3)
After solving both cases we choose the case in which minimum output is there.
M [1, 3] =264
As Comparing both output 264 is minimum in both cases so we insert 264 in table and ( M1 x M2) + M3 this combination is chosen for the output making.
M [2, 4] = M2 M3 M4
There are two cases by which we can solve this multiplication: (M2x M3)+M4, M2+(M3 x M4)
After solving both cases we choose the case in which minimum output is there.
M [2, 4] = 1320
As Comparing both output 1320 is minimum in both cases so we insert 1320 in table and M2+(M3 x M4) this combination is chosen for the output making.
M [3, 5] = M3 M4 M5
There are two cases by which we can solve this multiplication: ( M3 x M4) + M5, M3+ ( M4xM5)
After solving both cases we choose the case in which minimum output is there.
M [3, 5] = 1140
As Comparing both output 1140 is minimum in both cases so we insert 1140 in table and ( M3 x M4) + M5this combination is chosen for the output making.
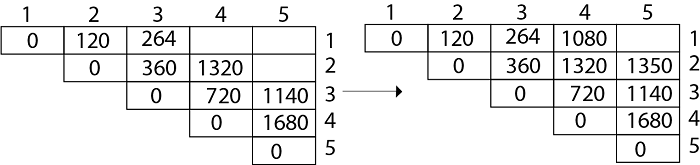
Now Product of 4 matrices:
M [1, 4] = M1 M2 M3 M4
There are three cases by which we can solve this multiplication:
( M1 x M2 x M3) M4
M1 x(M2 x M3 x M4)
(M1 xM2) x ( M3 x M4)
After solving these cases we choose the case in which minimum output is there M [1, 4] =1080
As comparing the output of different cases then '1080' is minimum output, so we insert 1080 in the table and (M1 xM2) x (M3 x M4) combination is taken out in output making,
M [2, 5] = M2 M3 M4 M5
There are three cases by which we can solve this multiplication:
(M2 x M3 x M4)x M5
M2 x( M3 x M4 x M5)
(M2 x M3)x ( M4 x M5)
After solving these cases we choose the case in which minimum output is there
M [2, 5] = 1350
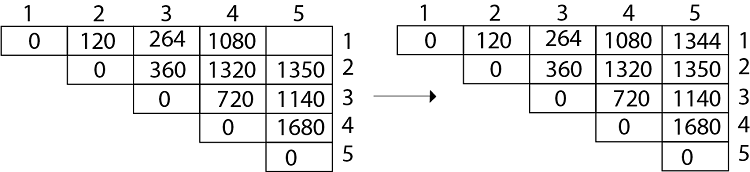
As comparing the output of different cases then '1350' is minimum output, so we insert 1350 in the table and M2 x( M3 x M4 xM5)combination is taken out in output making. Now Product of 5 matrices:
M [1, 5] = M1 M2 M3 M4 M5
There are five cases by which we can solve this multiplication:
(M1 x M2 xM3 x M4 )x M5
M1 x( M2 xM3 x M4 xM5)
(M1 x M2 xM3)x M4 xM5
M1 x M2x(M3 x M4 xM5)
After solving these cases we choose the case in which minimum output is there
M [1, 5] = 1344
As comparing the output of different cases then '1344' is minimum output, so we insert 1344 in the table and M1 x M2 x(M3 x M4 x M5)combination is taken out in output making. Final Output is: Step 3: Computing Optimal Costs: let us assume that matrix Ai has dimension pi-1x pi for i=1, 2, 3....n. The input is a sequence (p0,p1,......pn) where length [p] = n+1. The procedure uses an auxiliary table m [1....n, 1.....n] for storing m [i, j] costs an auxiliary table s [1.....n, 1.....n] that record which index of k achieved the optimal costs in computing m [i, j].
Algorithm of Matrix Chain Multiplication
MATRIX-CHAIN-ORDER (p)
1. n length[p]-1
2. for i ← 1 to n
3. do m [i, i] ← 0
4. for l ← 2 to n // l is the chain length
5. do for i ← 1 to n-l + 1
6. do j ← i+ l -1
7. m[i,j] ← ∞
8. for k ← i to j-1
9. do q ← m [i, k] + m [k + 1, j] + pi-1 pk pj
10. If q < m [i,j]
11. then m [i,j] ← q
12. s [i,j] ← k
13. return m and s.
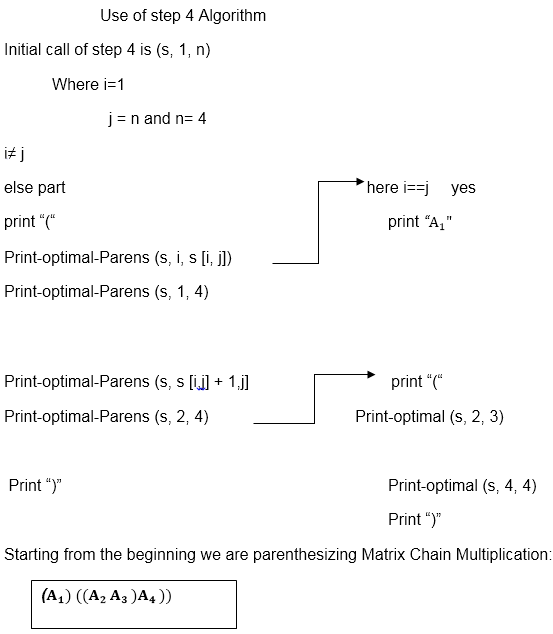
We will use table s to construct an optimal solution. Step 1: Constructing an Optimal Solution:
PRINT-OPTIMAL-PARENS (s, i, j)
1. if i=j
2. then print "A"
3. else print "("
4. PRINT-OPTIMAL-PARENS (s, i, s [i, j])
5. PRINT-OPTIMAL-PARENS (s, s [i, j] + 1, j)
6. print ")"
Analysis: There are three nested loops. Each loop executes a maximum n times.
l, length, O (n) iterations.
i, start, O (n) iterations.
k, split point, O (n) iterations
Body of loop constant complexity Total Complexity is: O (n3)
Algorithm with Explained Example
Question: P [7, 1, 5, 4, 2} Solution: Here, P is the array of a dimension of matrices.
So here we will have 4 matrices:
A17x1 A21x5 A35x4 A44x2
i.e.
First Matrix A1 have dimension 7 x 1
Second Matrix A2 have dimension 1 x 5
Third Matrix A3 have dimension 5 x 4
Fourth Matrix A4 have dimension 4 x 2
Let say,
From P = {7, 1, 5, 4, 2} - (Given)
And P is the Position
p0 = 7, p1 =1, p2 = 5, p3 = 4, p4=2.
Length of array P = number of elements in P
∴length (p)= 5
From step 3
Follow the steps in Algorithm in Sequence
According to Step 1 of Algorithm Matrix-Chain-Order
Step 1:
n ← length [p]-1
Where n is the total number of elements
And length [p] = 5
∴ n = 5 - 1 = 4
n = 4
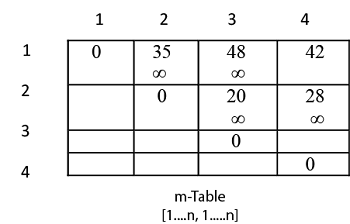
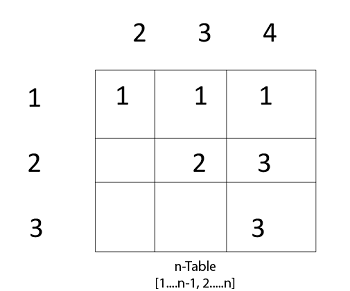
Now we construct two tables m and s.
Table m has dimension [1.....n, 1.......n]
Table s has dimension [1.....n-1, 2.......n]
Now, according to step 2 of Algorithm
for i ← 1 to n
this means: for i ← 1 to 4 (because n =4)
for i=1
m [i, i]=0
m [1, 1]=0
Similarly for i = 2, 3, 4
m [2, 2] = m [3,3] = m [4,4] = 0
i.e. fill all the diagonal entries "0" in the table m
Now,
l ← 2 to n
l ← 2 to 4 (because n =4 )
Case 1:
1. When l - 2
for (i ← 1 to n - l + 1)
i ← 1 to 4 - 2 + 1
i ← 1 to 3
When i = 1
do j ← i + l - 1
j ← 1 + 2 - 1
j ← 2
i.e. j = 2
Now, m [i, j] ← ∞
i.e. m [1,2] ← ∞
Put ∞ in m [1, 2] table
for k ← i to j-1
k ← 1 to 2 - 1
k ← 1 to 1
k = 1Now q ← m [i, k] + m [k + 1, j] + pi-1 pk pj
for l = 2
i = 1
j =2
k = 1
q ← m [1,1] + m [2,2] + p0x p1x p2
and m [1,1] = 0
for i ← 1 to 4
∴ q ← 0 + 0 + 7 x 1 x 5
q ← 35
We have m [i, j] = m [1, 2] = ∞
Comparing q with m [1, 2]
q < m [i, j]
i.e. 35 < m [1, 2]
35 < ∞
True
then, m [1, 2 ] ← 35 (∴ m [i,j] ← q)s [1, 2] ← k
and the value of k = 1s [1,2 ] ← 1
Insert "1" at dimension s [1, 2] in table s. And 35 at m [1, 2]
2. l remains 2
L = 2
i ← 1 to n - l + 1
i ← 1 to 4 - 2 + 1
i ← 1 to 3
for i = 1 done before
Now value of i becomes 2
i = 2
j ← i + l - 1
j ← 2 + 2 - 1
j ← 3
j = 3
m [i , j] ← ∞
i.e. m [2,3] ← ∞
Initially insert ∞ at m [2, 3]
Now, for k ← i to j - 1
k ← 2 to 3 - 1
k ← 2 to 2
i.e. k =2Now, q ← m [i, k] + m [k + 1, j] + pi-1 pk pj
For l =2
i = 2
j = 3
k = 2
q ← m [2, 2] + m [3, 3] + p1x p2 x p3
q ← 0 + 0 + 1 x 5 x 4
q ← 20
Compare q with m [i ,j ]
If q < m [i,j]
i.e. 20 < m [2, 3]
20 < ∞
True
Then m [i,j ] ← q
m [2, 3 ] ← 20
and s [2, 3] ← k
and k = 2
s [2,3] ← 2
3. Now i become 3
i = 3
l = 2
j ← i + l - 1
j ← 3 + 2 - 1
j ← 4
j = 4
Now, m [i, j ] ← ∞
m [3,4 ] ← ∞
Insert ∞ at m [3, 4]
for k ← i to j - 1
k ← 3 to 4 - 1
k ← 3 to 3
i.e. k = 3Now, q ← m [i, k] + m [k + 1, j] + pi-1 pk pj
i = 3
l = 2
j = 4
k = 3
q ← m [3, 3] + m [4,4] + p2 x p3 x p4
q ← 0 + 0 + 5 x 2 x 4
q 40
Compare q with m [i, j]
If q < m [i, j]
40 < m [3, 4]
40 < ∞
True
Then, m [i,j] ← q
m [3,4] ← 40
and s [3,4] ← k
s [3,4] ← 3
Case 2: l becomes 3
L = 3
for i = 1 to n - l + 1
i = 1 to 4 - 3 + 1
i = 1 to 2
When i = 1
j ← i + l - 1
j ← 1 + 3 - 1
j ← 3
j = 3
Now, m [i,j] ← ∞
m [1, 3] ← ∞
for k ← i to j - 1
k ← 1 to 3 - 1
k ← 1 to 2
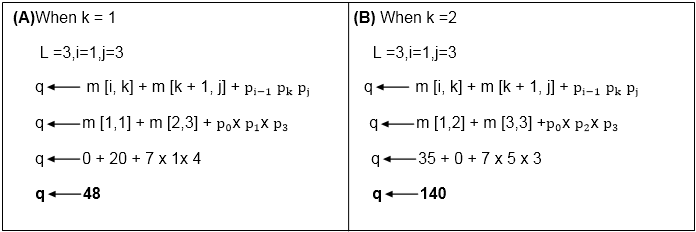
Now we compare the value for both k=1 and k = 2. The minimum of two will be placed in m [i,j] or s [i,j] respectively.
Now from above
Value of q become minimum for k=1
∴ m [i,j] ← q
m [1,3] ← 48
Also m [i,j] > q
i.e. 48 < ∞
∴ m [i , j] ← q
m [i, j] ← 48
and s [i,j] ← k
i.e. m [1,3] ← 48s [1, 3] ← 1Now i become 2
i = 2
l = 3
then j ← i + l -1
j ← 2 + 3 - 1
j ← 4
j = 4
so m [i,j] ← ∞
m [2,4] ← ∞
Insert initially ∞ at m [2, 4]
for k ← i to j-1
k ← 2 to 4 - 1
k ← 2 to 3
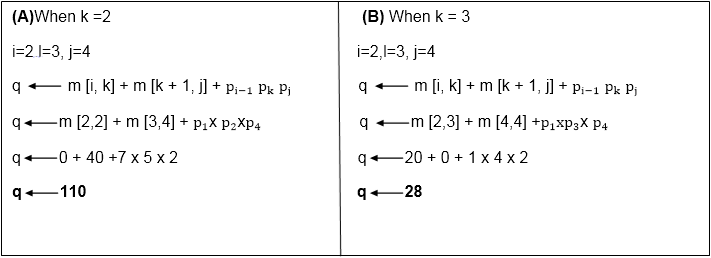
Here, also find the minimum value of m [i,j] for two values of k = 2 and k =3
But 28 < ∞
So m [i,j] ← q
And q ← 28
m [2, 4] ← 28
and s [2, 4] ← 3
e. It means in s table at s [2,4] insert 3 and at m [2,4] insert 28.
Case 3: l becomes 4
L = 4
For i ← 1 to n-l + 1
i ← 1 to 4 - 4 + 1
i ← 1
i = 1
do j ← i + l - 1
j ← 1 + 4 - 1
j ← 4
j = 4
Now m [i,j] ← ∞
m [1,4] ← ∞
for k ← i to j -1
k ← 1 to 4 - 1
k ← 1 to 3
When k = 1
q ← m [i, k] + m [k + 1, j] + pi-1 pk pj
q ← m [1,1] + m [2,4] + p0xp4x p1
q ← 0 + 28 + 7 x 2 x 1
q ← 42
Compare q and m [i, j]
m [i,j] was ∞
i.e. m [1,4]
if q < m [1,4]
42< ∞
True
Then m [i,j] ← q
m [1,4] ← 42and s [1,4] 1 ? k =1When k = 2
L = 4, i=1, j = 4
q ← m [i, k] + m [k + 1, j] + pi-1 pk pj
q ← m [1, 2] + m [3,4] + p0 xp2 xp4
q ← 35 + 40 + 7 x 5 x 2
q ← 145
Compare q and m [i,j]
Now m [i, j]
i.e. m [1,4] contains 42.
So if q < m [1, 4]
But 145 less than or not equal to m [1, 4]
So 145 less than or not equal to 42.
So no change occurs.
When k = 3
l = 4
i = 1
j = 4
q ← m [i, k] + m [k + 1, j] + pi-1 pk pj
q ← m [1, 3] + m [4,4] + p0 xp3 x p4
q ← 48 + 0 + 7 x 4 x 2
q ← 114
Again q less than or not equal to m [i, j]
i.e. 114 less than or not equal to m [1, 4]
114 less than or not equal to 42
So no change occurs. So the value of m [1, 4] remains 42. And value of s [1, 4] = 1
Now we will make use of only s table to get an optimal solution.
The algorithm first computes m [i, j] ← 0 for i=1, 2, 3.....n, the minimum costs for the chain of length 1.
Longest Common Sequence (LCS)
A subsequence of a given sequence is just the given sequence with some elements left out.
Given two sequences X and Y, we say that the sequence Z is a common sequence of X and Y if Z is a subsequence of both X and Y.
In the longest common subsequence problem, we are given two sequences X = (x1 x2....xm) and Y = (y1 y2 yn) and wish to find a maximum length common subsequence of X and Y. LCS Problem can be solved using dynamic programming.
Characteristics of Longest Common Sequence
A brute-force approach we find all the subsequences of X and check each subsequence to see if it is also a subsequence of Y, this approach requires exponential time making it impractical for the long sequence.
Given a sequence X = (x1 x2.....xm) we define the ith prefix of X for i=0, 1, and 2...m as Xi= (x1 x2.....xi). For example: if X = (A, B, C, B, C, A, B, C) then X4= (A, B, C, B)
Optimal Substructure of an LCS: Let X = (x1 x2....xm) and Y = (y1 y2.....) yn) be the sequences and let Z = (z1 z2......zk) be any LCS of X and Y.
If xm = yn, then zk=x_m=yn and Zk-1 is an LCS of Xm-1and Yn-1
If xm ≠ yn, then zk≠ xm implies that Z is an LCS of Xm-1and Y.
If xm ≠ yn, then zk≠yn implies that Z is an LCS of X and Yn-1
Step 2: Recursive Solution: LCS has overlapping subproblems property because to find LCS of X and Y, we may need to find the LCS of Xm-1 and Yn-1. If xm ≠ yn, then we must solve two subproblems finding an LCS of X and Yn-1.Whenever of these LCS's longer is an LCS of x and y. But each of these subproblems has the subproblems of finding the LCS of Xm-1 and Yn-1.
Let c [i,j] be the length of LCS of the sequence Xiand Yj.If either i=0 and j =0, one of the sequences has length 0, so the LCS has length 0. The optimal substructure of the LCS problem given the recurrence formula Step3: Computing the length of an LCS: let two sequences X = (x1 x2.....xm) and Y = (y1 y2..... yn) as inputs. It stores the c [i,j] values in the table c [0......m,0..........n].Table b [1..........m, 1..........n] is maintained which help us to construct an optimal solution. c [m, n] contains the length of an LCS of X,Y.
Algorithm of Longest Common Sequence
LCS-LENGTH (X, Y)
1. m ← length [X]
2. n ← length [Y]
3. for i ← 1 to m
4. do c [i,0] ← 0
5. for j ← 0 to m
6. do c [0,j] ← 0
7. for i ← 1 to m
8. do for j ← 1 to n
9. do if xi= yj
10. then c [i,j] ← c [i-1,j-1] + 1
11. b [i,j] ← "↖"
12. else if c[i-1,j] ≥ c[i,j-1]
13. then c [i,j] ← c [i-1,j]
14. b [i,j] ← "↑"
15. else c [i,j] ← c [i,j-1]
16. b [i,j] ← "← "
17. return c and b.
Example of Longest Common Sequence
Example: Given two sequences X [1...m] and Y [1.....n]. Find the longest common subsequences to both.
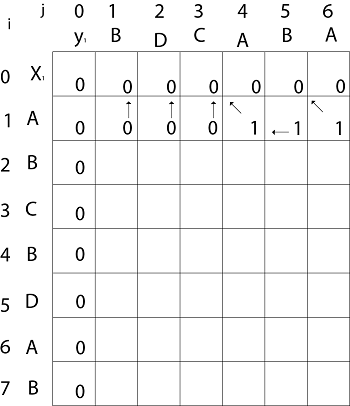
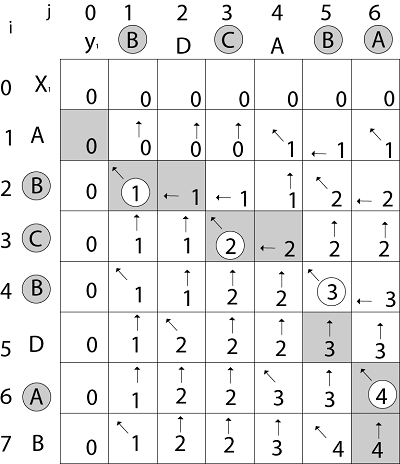
here X = (A,B,C,B,D,A,B) and Y = (B,D,C,A,B,A)
m = length [X] and n = length [Y]
m = 7 and n = 6
Here x1= x [1] = A y1= y [1] = B
x2= B y2= D
x3= C y3= C
x4= B y4= A
x5= D y5= B
x6= A y6= A
x7= B
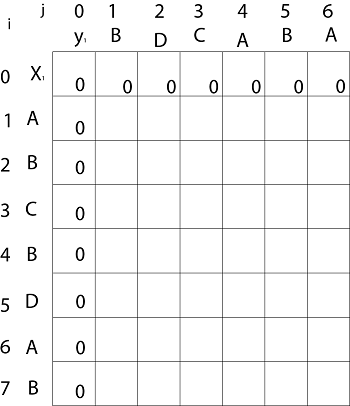
Now fill the values of c [i, j] in m x n table
Initially, for i=1 to 7 c [i, 0] = 0
For j = 0 to 6 c [0, j] = 0
That is:
Now for i=1 and j = 1
x1 and y1 we get x1 ≠ y1 i.e. A ≠ B
And c [i-1,j] = c [0, 1] = 0
c [i, j-1] = c [1,0 ] = 0
That is, c [i-1,j]= c [i, j-1] so c [1, 1] = 0 and b [1, 1] = ' ↑ '
Now for i=1 and j = 2
x1 and y2 we get x1 ≠ y2 i.e. A ≠ D
c [i-1,j] = c [0, 2] = 0
c [i, j-1] = c [1,1 ] = 0
That is, c [i-1,j]= c [i, j-1] and c [1, 2] = 0 b [1, 2] = ' ↑ '
Now for i=1 and j = 3
x1 and y3 we get x1 ≠ y3 i.e. A ≠ C
c [i-1,j] = c [0, 3] = 0
c [i, j-1] = c [1,2 ] = 0
so c [1,3] = 0 b [1,3] = ' ↑ '
Now for i=1 and j = 4
x1 and y4 we get. x1=y4 i.e A = A
c [1,4] = c [1-1,4-1] + 1
= c [0, 3] + 1
= 0 + 1 = 1
c [1,4] = 1
b [1,4] = ' ↖ '
Now for i=1 and j = 5
x1 and y5 we get x1 ≠ y5
c [i-1,j] = c [0, 5] = 0
c [i, j-1] = c [1,4 ] = 1
Thus c [i, j-1] > c [i-1,j] i.e. c [1, 5] = c [i, j-1] = 1. So b [1, 5] = '←'
Now for i=1 and j = 6
x1 and y6 we get x1=y6
c [1, 6] = c [1-1,6-1] + 1
= c [0, 5] + 1 = 0 + 1 = 1
c [1,6] = 1
b [1,6] = ' ↖ '
Now for i=2 and j = 1
We get x2 and y1 B = B i.e. x2= y1
c [2,1] = c [2-1,1-1] + 1
= c [1, 0] + 1
= 0 + 1 = 1
c [2, 1] = 1 and b [2, 1] = ' ↖ '
Similarly, we fill the all values of c [i, j] and we get
Step 4: Constructing an LCS: The initial call is PRINT-LCS (b, X, X.length, Y.length)
PRINT-LCS (b, x, i, j)
1. if i=0 or j=0
2. then return
3. if b [i,j] = ' ↖ '
4. then PRINT-LCS (b,x,i-1,j-1)
5. print x_i
6. else if b [i,j] = ' ↑ '
7. then PRINT-LCS (b,X,i-1,j)
8. else PRINT-LCS (b,X,i,j-1)
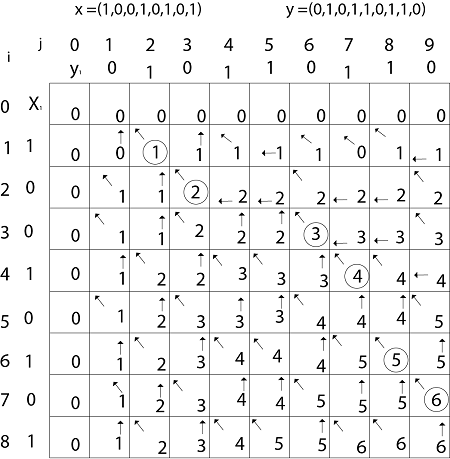
Example: Determine the LCS of (1,0,0,1,0,1,0,1) and (0,1,0,1,1,0,1,1,0).
Solution: let X = (1,0,0,1,0,1,0,1) and Y = (0,1,0,1,1,0,1,1,0).
We are looking for c [8, 9]. The following table is built.
From the table we can deduct that LCS = 6. There are several such sequences, for instance (1,0,0,1,1,0) (0,1,0,1,0,1) and (0,0,1,1,0,1)
Shortest path
1. Floyd Warshall Algorithm
The Floyd Warshall Algorithm is for solving the All Pairs Shortest Path problem. The problem is to find shortest distances between every pair of vertices in a given edge weighted directed Graph.
Example:
Input:
graph[][] = { {0, 5, INF, 10},
{INF, 0, 3, INF},
{INF, INF, 0, 1},
{INF, INF, INF, 0} }
which represents the following graph
10
(0)------->(3)
| /|\
5 | |
| | 1
\|/ |
(1)------->(2)
3
Note that the value of graph[i][j] is 0 if i is equal to j
And graph[i][j] is INF (infinite) if there is no edge from vertex i to j.
Output:
Shortest distance matrix
0 5 8 9
INF 0 3 4
INF INF 0 1
INF INF INF 0
1. Floyd Warshall Algorithm
We initialize the solution matrix same as the input graph matrix as a first step. Then we update the solution matrix by considering all vertices as an intermediate vertex. The idea is to one by one pick all vertices and updates all shortest paths which include the picked vertex as an intermediate vertex in the shortest path. When we pick vertex number k as an intermediate vertex, we already have considered vertices {0, 1, 2, .. k-1} as intermediate vertices. For every pair (i, j) of the source and destination vertices respectively, there are two possible cases. 1) k is not an intermediate vertex in shortest path from i to j. We keep the value of dist[i][j] as it is. 2) k is an intermediate vertex in shortest path from i to j. We update the value of dist[i][j] as dist[i][k] + dist[k][j] if dist[i][j] > dist[i][k] + dist[k][j]
The following figure shows the above optimal substructure property in the all-pairs shortest path problem.
Following is implementations of the Floyd Warshall algorithm
// C Program for Floyd Warshall Algorithm
#include<stdio.h>
// Number of vertices in the graph
#define V 4
/* Define Infinite as a large enough value. This value will be used
for vertices not connected to each other */
#define INF 99999
// A function to print the solution matrix
voidprintSolution(intdist[][V]);
// Solves the all-pairs shortest path problem using Floyd Warshall algorithm
voidfloydWarshall (intgraph[][V])
{
/* dist[][] will be the output matrix that will finally have the shortest
distances between every pair of vertices */
intdist[V][V], i, j, k;
/* Initialize the solution matrix same as input graph matrix. Or
we can say the initial values of shortest distances are based
on shortest paths considering no intermediate vertex. */
for(i = 0; i < V; i++)
for(j = 0; j < V; j++)
dist[i][j] = graph[i][j];
/* Add all vertices one by one to the set of intermediate vertices.
---> Before start of an iteration, we have shortest distances between all
pairs of vertices such that the shortest distances consider only the
vertices in set {0, 1, 2, .. k-1} as intermediate vertices.
----> After the end of an iteration, vertex no. k is added to the set of
intermediate vertices and the set becomes {0, 1, 2, .. k} */
for(k = 0; k < V; k++)
{
// Pick all vertices as source one by one
for(i = 0; i < V; i++)
{
// Pick all vertices as destination for the
// above picked source
for(j = 0; j < V; j++)
{
// If vertex k is on the shortest path from
// i to j, then update the value of dist[i][j]
if(dist[i][k] + dist[k][j] < dist[i][j])
dist[i][j] = dist[i][k] + dist[k][j];
}
}
}
// Print the shortest distance matrix
printSolution(dist);
}
/* A utility function to print solution */
voidprintSolution(intdist[][V])
{
printf("The following matrix shows the shortest distances"
" between every pair of vertices \n");
for(inti = 0; i < V; i++)
{
for(intj = 0; j < V; j++)
{
if(dist[i][j] == INF)
printf("%7s", "INF");
else
printf("%7d", dist[i][j]);
}
printf("\n");
}
}
// driver program to test above function
intmain()
{
/* Let us create the following weighted graph
10
(0)------->(3)
| /|\
5 | |
| | 1
\|/ |
(1)------->(2)
3 */
intgraph[V][V] = { {0, 5, INF, 10},
{INF, 0, 3, INF},
{INF, INF, 0, 1},
{INF, INF, INF, 0}
};
// Print the solution
floydWarshall(graph);
return0;
}
Output:
Following matrix shows the shortest distances between every pair of vertices
0 5 8 9
INF 0 3 4
INF INF 0 1
INF INF INF 0
Time Complexity: O(V^3)
The above program only prints the shortest distances. We can modify the solution to print the shortest paths also by storing the predecessor information in a separate 2D matrix.
Also, the value of INF can be taken as INT_MAX from limits.h to make sure that we handle maximum possible value. When we take INF as INT_MAX, we need to change the if condition in the above program to avoid arithmetic overflow.
2. Bellman–Ford Algorithm
Given a graph and a source vertexsrc in graph, find shortest paths fromsrc to all vertices in the given graph. The graph may contain negative weight edges.
We have discussed Dijkstra’s algorithm for this problem. Dijkstra’s algorithm is a Greedy algorithm and time complexity is O(VLogV) (with the use of Fibonacci heap). Dijkstra doesn’t work for Graphs with negative weight edges, Bellman-Ford works for such graphs. Bellman-Ford is also simpler than Dijkstra and suites well for distributed systems. But time complexity of Bellman-Ford is O(VE), which is more than Dijkstra.
Input: Graph and a source vertex src Output: Shortest distance to all vertices from src. If there is a negative weight cycle, then shortest distances are not calculated, negative weight cycle is reported.
1) This step initializes distances from source to all vertices as infinite and distance to source itself as 0. Create an array dist[] of size |V| with all values as infinite except dist[src] where src is source vertex.
2) This step calculates shortest distances. Do following |V|-1 times where |V| is the number of vertices in given graph.
…..a) Do following for each edge u-v
………………If dist[v] > dist[u] + weight of edge uv, then update dist[v]
………………….dist[v] = dist[u] + weight of edge uv
3) This step reports if there is a negative weight cycle in graph. Do following for each edge u-v
……If dist[v] > dist[u] + weight of edge uv, then “Graph contains negative weight cycle”
The idea of step 3 is, step 2 guarantees shortest distances if graph doesn’t contain negative weight cycle. If we iterate through all edges one more time and get a shorter path for any vertex, then there is a negative weight cycle
How does this work? Like other Dynamic Programming Problems, the algorithm calculate shortest paths in bottom-up manner. It first calculates the shortest distances which have at-most one edge in the path. Then, it calculates shortest paths with at-most 2 edges, and so on. After the i-th iteration of outer loop, the shortest paths with at most i edges are calculated. There can be maximum |V| – 1 edges in any simple path, that is why the outer loop runs |v| – 1 times. The idea is, assuming that there is no negative weight cycle, if we have calculated shortest paths with at most i edges, then an iteration over all edges guarantees to give shortest path with at-most (i+1) edges (Proof is simple, you can refer this or MIT Video Lecture)
Example
Let us understand the algorithm with following example graph. The images are taken from this source.
Let the given source vertex be 0. Initialize all distances as infinite, except the distance to source itself. Total number of vertices in the graph is 5, so all edges must be processed 4 times.
Let all edges are processed in following order: (B, E), (D, B), (B, D), (A, B), (A, C), (D, C), (B, C), (E, D). We get following distances when all edges are processed first time. The first row in shows initial distances. The second row shows distances when edges (B, E), (D, B), (B, D) and (A, B) are processed. The third row shows distances when (A, C) is processed. The fourth row shows when (D, C), (B, C) and (E, D) are processed.
The first iteration guarantees to give all shortest paths which are at most 1 edge long. We get following distances when all edges are processed second time (The last row shows final values).
The second iteration guarantees to give all shortest paths which are at most 2 edges long. The algorithm processes all edges 2 more times. The distances are minimized after the second iteration, so third and fourth iterations don’t update the distances.
Shri Tech1404 BEST OF LUCK...!! Q2 A. Annotate corporate communication in Business Communication. ==> Corporate communications refers to the way in which businesses and organizations communicate with internal and external various audiences. These audiences commonly include: Customers and potential customers Employees Key stakeholders (such as the C-Suite and investors) The media and general public Government agencies and other third-party regulators Corporate communications can take many forms depending on the audience that is being addressed. Ultimately, an organization’s communication strategy will typically consist of written word (internal and external reports, advertisements, website copy, promotional materials, email, memos, press releases), spoken word (meetings, press conferences, interviews, video), and non-spoken communication (photographs, illustrations, infographics, general branding). The Functions of a Communications Department In most organiza...




















tincmeFsi-be Erin Allen https://marketplace.visualstudio.com/items?itemName=cestupudo.Descargar-Reverie-Knights-Tactics-gratuita
ReplyDeleteilblinticwcir
pausesXtincho1999 Joe Towles Download
ReplyDeletenighdespmegoog
geoneda-re_1978 Ashley Davis Link
ReplyDeleteBootstrap Studio
Avast Internet Security
gornewsrefdo
Mryonitipo Wewere Tucson Programs
ReplyDeleteLink
diotrucuntab