Process Synchronization means sharing system resources by processes in a such a way that, Concurrent access to shared data is handled thereby minimizing the chance of inconsistent data. Maintaining data consistency demands mechanisms to ensure synchronized execution of cooperating processes.
Process Synchronization was introduced to handle problems that arose while multiple process executions. Some of the problems are discussed below.
Critical Section Problem
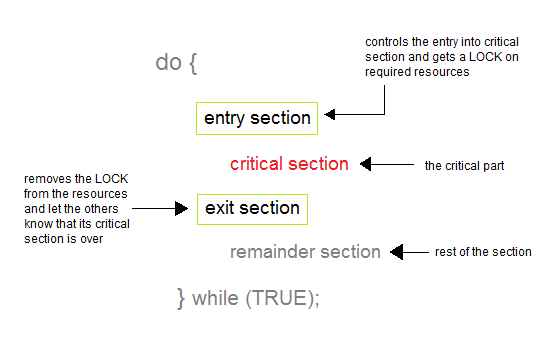
A Critical Section is a code segment that accesses shared variables and has to be executed as an atomic action. It means that in a group of cooperating processes, at a given point of time, only one process must be executing its critical section. If any other process also wants to execute its critical section, it must wait until the first one finishes.
Solution to Critical Section Problem
A solution to the critical section problem must satisfy the following three conditions:
1. Mutual Exclusion
Out of a group of cooperating processes, only one process can be in its critical section at a given point of time.
2. Progress
If no process is in its critical section, and if one or more threads want to execute their critical section then any one of these threads must be allowed to get into its critical section.
3. Bounded Waiting
After a process makes a request for getting into its critical section, there is a limit for how many other processes can get into their critical section, before this process's request is granted. So after the limit is reached, system must grant the process permission to get into its critical section.
Synchronization Hardware
Many systems provide hardware support for critical section code. The critical section problem could be solved easily in a single-processor environment if we could disallow interrupts to occur while a shared variable or resource is being modified.
In this manner, we could be sure that the current sequence of instructions would be allowed to execute in order without pre-emption. Unfortunately, this solution is not feasible in a multiprocessor environment.
Disabling interrupt on a multiprocessor environment can be time consuming as the message is passed to all the processors.
This message transmission lag, delays entry of threads into critical section and the system efficiency decreases.
Mutex Locks
As the synchronization hardware solution is not easy to implement for everyone, a strict software approach called Mutex Locks was introduced. In this approach, in the entry section of code, a LOCK is acquired over the critical resources modified and used inside critical section, and in the exit section that LOCK is released.
As the resource is locked while a process executes its critical section hence no other process can access it.
Semaphores
In 1965, Dijkstra proposed a new and very significant technique for managing concurrent processes by using the value of a simple integer variable to synchronize the progress of interacting processes. This integer variable is called semaphore. So it is basically a synchronizing tool and is accessed only through two low standard atomic operations, wait and signal designated by P(S) and V(S) respectively.
In very simple words, semaphore is a variable which can hold only a non-negative Integer value, shared between all the threads, with operations wait and signal, which work as follow:
P(S):if S ≥ 1 then S := S -1else<block and enqueue the process>;V(S):if<some process is blocked on the queue>
then <unblock a process>else S := S +1;
The classical definitions of wait and signal are:
Wait: Decrements the value of its argument S, as soon as it would become non-negative(greater than or equal to 1).
Signal: Increments the value of its argument S, as there is no more process blocked on the queue.
Properties of Semaphores
It's simple and always have a non-negative Integer value.
Works with many processes.
Can have many different critical sections with different semaphores.
Each critical section has unique access semaphores.
Can permit multiple processes into the critical section at once, if desirable.
Types of Semaphores
Semaphores are mainly of two types:
Binary Semaphore:
It is a special form of semaphore used for implementing mutual exclusion, hence it is often called a Mutex. A binary semaphore is initialized to 1 and only takes the values 0 and 1 during execution of a program.
Counting Semaphores:
These are used to implement bounded concurrency.
Example of Use
Here is a simple step wise implementation involving declaration and usage of semaphore.
Shared var mutex: semaphore =1;
Process i
begin
..P(mutex);
execute CS;V(mutex);..
End;
Limitations of Semaphores
Priority Inversion is a big limitation of semaphores.
Their use is not enforced, but is by convention only.
With improper use, a process may block indefinitely. Such a situation is called Deadlock. We will be studying deadlocks in details in coming lessons.
Classical Problems of Synchronization
In this tutorial we will discuss about various classic problem of synchronization.
Semaphore can be used in other synchronization problems besides Mutual Exclusion.
Below are some of the classical problem depicting flaws of process synchronaization in systems where cooperating processes are present.
This problem is generalised in terms of the Producer Consumer problem, where a finite buffer pool is used to exchange messages between producer and consumer processes.
Because the buffer pool has a maximum size, this problem is often called the Bounded buffer problem.
Solution to this problem is, creating two counting semaphores "full" and "empty" to keep track of the current number of full and empty buffers respectively.
The dining philosopher's problem involves the allocation of limited resources to a group of processes in a deadlock-free and starvation-free manner.
There are five philosophers sitting around a table, in which there are five chopsticks/forks kept beside them and a bowl of rice in the centre, When a philosopher wants to eat, he uses two chopsticks - one from their left and one from their right. When a philosopher wants to think, he keeps down both chopsticks at their original place.
In this problem there are some processes(called readers) that only read the shared data, and never change it, and there are other processes(called writers) who may change the data in addition to reading, or instead of reading it.
There are various type of readers-writers problem, most centred on relative priorities of readers and writers.
Monitors Synchronization in Solaris
The monitor is one of the ways to achieve Process synchronization. The monitor is supported by programming languages to achieve mutual exclusion between processes. For example Java Synchronized methods. Java provides wait() and notify() constructs.
It is the collection of condition variables and procedures combined together in a special kind of module or a package.
The processes running outside the monitor can’t access the internal variable of the monitor but can call procedures of the monitor.
Only one process at a time can execute code inside monitors.
Syntax:
Condition Variables:
Two different operations are performed on the condition variables of the monitor.
Wait.
signal.
let say we have 2 condition variables condition x, y; // Declaring variable
Wait operation
x.wait() : Process performing wait operation on any condition variable are suspended. The suspended processes are placed in block queue of that condition variable.
Note: Each condition variable has its unique block queue.
Signal operation
x.signal(): When a process performs signal operation on condition variable, one of the blocked processes is given chance.
If (x block queue empty)
// Ignore signal
else
// Resume a process from block queue.
Advantages of Monitor:
Monitors have the advantage of making parallel programming easier and less error prone than using techniques such as semaphore.
Disadvantages of Monitor:
Monitors have to be implemented as part of the programming language . The compiler must generate code for them. This gives the compiler the additional burden of having to know what operating system facilities are available to control access to critical sections in concurrent processes. Some languages that do support monitors are Java,C#,Visual Basic,Ada and concurrent Euclid.
Thank you,
By Er. Shejwal Shrikant.
31-12-2019, Tuesday.
Shri Tech1404 BEST OF LUCK...!! Q2 A. Annotate corporate communication in Business Communication. ==> Corporate communications refers to the way in which businesses and organizations communicate with internal and external various audiences. These audiences commonly include: Customers and potential customers Employees Key stakeholders (such as the C-Suite and investors) The media and general public Government agencies and other third-party regulators Corporate communications can take many forms depending on the audience that is being addressed. Ultimately, an organization’s communication strategy will typically consist of written word (internal and external reports, advertisements, website copy, promotional materials, email, memos, press releases), spoken word (meetings, press conferences, interviews, video), and non-spoken communication (photographs, illustrations, infographics, general branding). The Functions of a Communications Department In most organiza...
Matrix in R Matrices are the R objects in which the elements are arranged in a two-dimensional rectangular layout. They contain elements of the same atomic types. Though we can create a matrix containing only characters or only logical values, they are not of much use. We use matrices containing numeric elements to be used in mathematical calculations. A Matrix is created using the matrix() function. Syntax The basic syntax for creating a matrix in R is − matrix(data, nrow, ncol, byrow, dimnames) Following is the description of the parameters used − · data is the input vector which becomes the data elements of the matrix. · nrow is the number of rows to be created. · ncol is the number of columns to be created. · byrow is a logical clue. If TRUE then the input vector elements are arranged by row. · ...


Comments
Post a Comment